تاريخ الرياضيات

الاعداد و نظريتها
تاريخ التحليل
تار يخ الجبر
الهندسة و التبلوجي
الرياضيات في الحضارات المختلفة
العربية
اليونانية
البابلية
الصينية
المايا
المصرية
الهندية
الرياضيات المتقطعة
المنطق
اسس الرياضيات
فلسفة الرياضيات
مواضيع عامة في المنطق
الجبر
الجبر الخطي
الجبر المجرد
الجبر البولياني
مواضيع عامة في الجبر
الضبابية
نظرية المجموعات
نظرية الزمر
نظرية الحلقات والحقول
نظرية الاعداد
نظرية الفئات
حساب المتجهات
المتتاليات-المتسلسلات
المصفوفات و نظريتها
المثلثات
الهندسة
الهندسة المستوية
الهندسة غير المستوية
مواضيع عامة في الهندسة
التفاضل و التكامل
المعادلات التفاضلية و التكاملية
معادلات تفاضلية
معادلات تكاملية
مواضيع عامة في المعادلات
التحليل
التحليل العددي
التحليل العقدي
التحليل الدالي
مواضيع عامة في التحليل
التحليل الحقيقي
التبلوجيا
نظرية الالعاب
الاحتمالات و الاحصاء
نظرية التحكم
بحوث العمليات
نظرية الكم
الشفرات
الرياضيات التطبيقية
نظريات ومبرهنات
علماء الرياضيات
500AD
500-1499
1000to1499
1500to1599
1600to1649
1650to1699
1700to1749
1750to1779
1780to1799
1800to1819
1820to1829
1830to1839
1840to1849
1850to1859
1860to1864
1865to1869
1870to1874
1875to1879
1880to1884
1885to1889
1890to1894
1895to1899
1900to1904
1905to1909
1910to1914
1915to1919
1920to1924
1925to1929
1930to1939
1940to the present
علماء الرياضيات
الرياضيات في العلوم الاخرى
بحوث و اطاريح جامعية
هل تعلم
طرائق التدريس
الرياضيات العامة
نظرية البيان

LINEAR TIME-OPTIMAL CONTROL-EXAMPLES
 المؤلف:
Lawrence C. Evans
المؤلف:
Lawrence C. Evans
 المصدر:
An Introduction to Mathematical Optimal Control Theory
المصدر:
An Introduction to Mathematical Optimal Control Theory
 الجزء والصفحة:
35-40
الجزء والصفحة:
35-40
 8-10-2016
8-10-2016
 1966
1966




+
-
20
EXAMPLE 1: ROCKET RAILROAD CAR. We recall this example, introduced in §1.2. We have

For
According to the Pontryagin Maximum Principle, there exists h≠0 such that

We will extract the interesting fact that an optimal control α∗ switches at most one time.
We must compute etM. To do so, we observe

and therefore Mk = 0 for all k ≥ 2. Consequently,
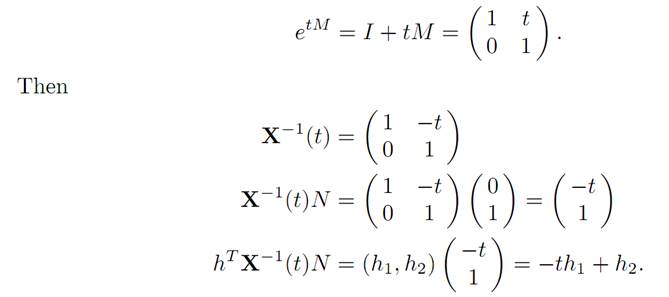
The Maximum Principle asserts

and this implies that
α∗ (t) = sgn(−th1 + h2)
for the sign function
Therefore the optimal control α∗ switches at most once; and if h1 = 0, then α∗ is constant.
Since the optimal control switches at most once, then the control we constructed by a geometric method in §1.3 must have been optimal.
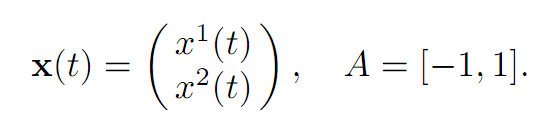
EXAMPLE 2: CONTROL OF A VIBRATING SPRING. Consider next the simple dynamics
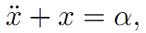
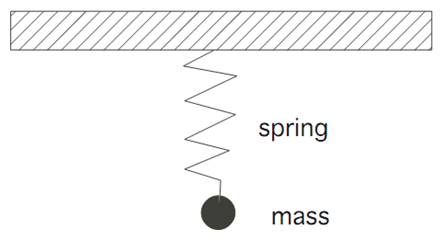
where we interpret the control as an exterior force acting on an oscillating weight (of unit mass) hanging from a spring. Our goal is to design an optimal exterior forcing α∗(.) that brings the motion to a stop in minimum time.
We have n = 2, m = 1. The individual dynamical equations read:
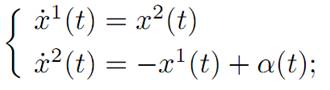
which in vector notation become

for |α(t)| ≤ 1. That is, A = [−1, 1].
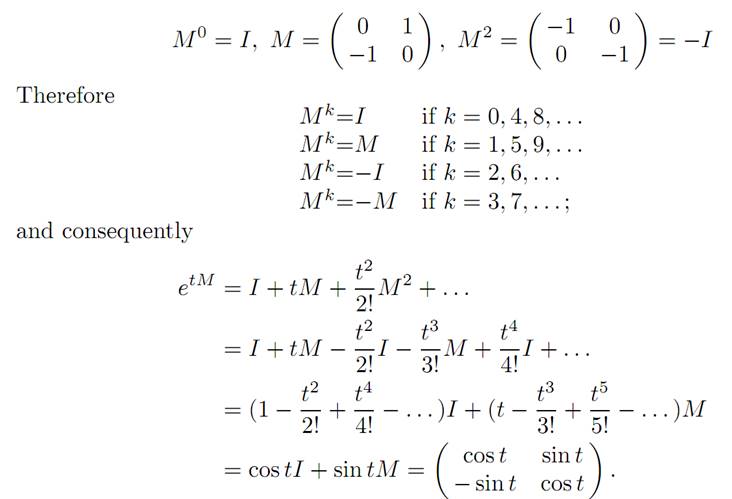
Using the maximum principle. We employ the Pontryagin Maximum Principle, which asserts that there exists h ≠ 0 such that

To extract useful information from (M) we must compute X(.). To do so, we observe that the matrix M is skew symmetric, and thus
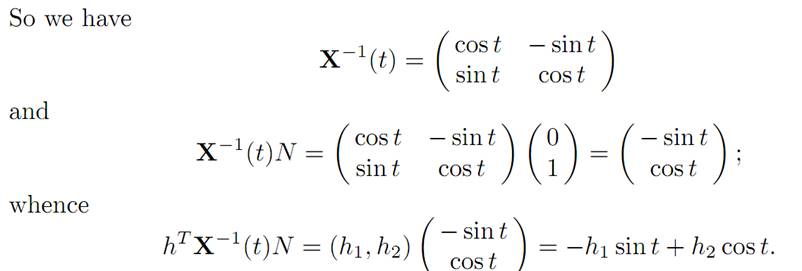
According to condition (M), for each time t we have

Therefore
α∗(t) = sgn(−h1 sin t + h2 cos t).
Finding the optimal control. To simplify further, we may assume h21+h22 =1. Recall the trig identity sin(x + y) = sin x cos y + cos x sin y, and choose δ such that
−h1 = cos δ, h2 = sin δ. Then
α∗ (t) = sgn(cos δ sin t + sin δ cos t) = sgn(sin(t + δ)).
We deduce therefore that α∗ switches from +1 to −1, and vice versa, every π units of time.
Geometric interpretation. Next, we figure out the geometric consequences.
When α ≡ 1, our (ODE) becomes

In this case, we can calculate that

Consequently, the motion satisfies (x1(t) − 1)2 + (x2)2(t) ≡ r21, for some radius r1, and therefore the trajectory lies on a circle with center (1, 0), as illustrated.
If α ≡ −1, then (ODE) instead becomes
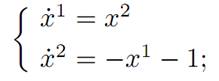
in which case

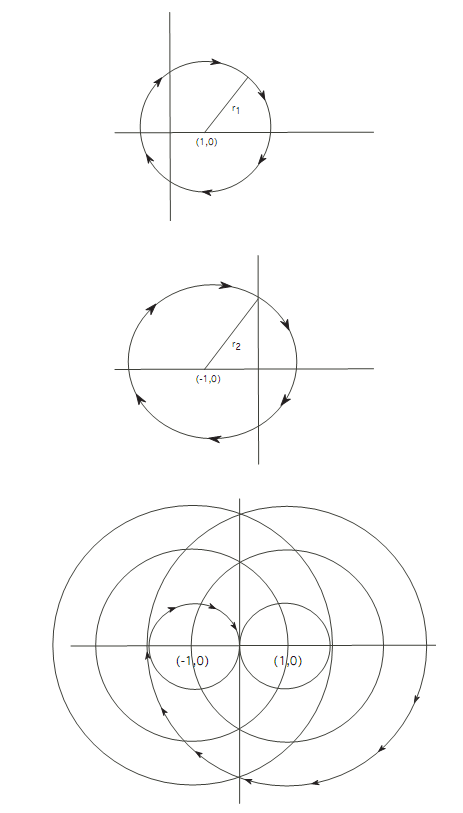
Thus (x1(t)+1)2 +(x2)2(t) = r22 for some radius r2, and the motion lies on a circle with center (−1, 0).
In summary, to get to the origin we must switch our control α(.) back and forth between the values ±1, causing the trajectory to switch between lying on circles centered at (±1, 0). The switches occur each π units of time.
References
[B-CD] M. Bardi and I. Capuzzo-Dolcetta, Optimal Control and Viscosity Solutions of Hamilton-Jacobi-Bellman Equations, Birkhauser, 1997.
[B-J] N. Barron and R. Jensen, The Pontryagin maximum principle from dynamic programming and viscosity solutions to first-order partial differential equations, Transactions AMS 298 (1986), 635–641.
[C1] F. Clarke, Optimization and Nonsmooth Analysis, Wiley-Interscience, 1983.
[C2] F. Clarke, Methods of Dynamic and Nonsmooth Optimization, CBMS-NSF Regional Conference Series in Applied Mathematics, SIAM, 1989.
[Cr] B. D. Craven, Control and Optimization, Chapman & Hall, 1995.
[E] L. C. Evans, An Introduction to Stochastic Differential Equations, lecture notes avail-able at http://math.berkeley.edu/˜ evans/SDE.course.pdf.
[F-R] W. Fleming and R. Rishel, Deterministic and Stochastic Optimal Control, Springer, 1975.
[F-S] W. Fleming and M. Soner, Controlled Markov Processes and Viscosity Solutions, Springer, 1993.
[H] L. Hocking, Optimal Control: An Introduction to the Theory with Applications, OxfordUniversity Press, 1991.
[I] R. Isaacs, Differential Games: A mathematical theory with applications to warfare and pursuit, control and optimization, Wiley, 1965 (reprinted by Dover in 1999).
[K] G. Knowles, An Introduction to Applied Optimal Control, Academic Press, 1981.
[Kr] N. V. Krylov, Controlled Diffusion Processes, Springer, 1980.
[L-M] E. B. Lee and L. Markus, Foundations of Optimal Control Theory, Wiley, 1967.
[L] J. Lewin, Differential Games: Theory and methods for solving game problems with singular surfaces, Springer, 1994.
[M-S] J. Macki and A. Strauss, Introduction to Optimal Control Theory, Springer, 1982.
[O] B. K. Oksendal, Stochastic Differential Equations: An Introduction with Applications, 4th ed., Springer, 1995.
[O-W] G. Oster and E. O. Wilson, Caste and Ecology in Social Insects, Princeton UniversityPress.
[P-B-G-M] L. S. Pontryagin, V. G. Boltyanski, R. S. Gamkrelidze and E. F. Mishchenko, The Mathematical Theory of Optimal Processes, Interscience, 1962.
[T] William J. Terrell, Some fundamental control theory I: Controllability, observability, and duality, American Math Monthly 106 (1999), 705–719.
 الاكثر قراءة في نظرية التحكم
الاكثر قراءة في نظرية التحكم
 اخر الاخبار
اخر الاخبار
اخبار العتبة العباسية المقدسة

الآخبار الصحية


مواضيع ذات صلة
 قسم الشؤون الفكرية يصدر كتاباً يوثق تاريخ السدانة في العتبة العباسية المقدسة
قسم الشؤون الفكرية يصدر كتاباً يوثق تاريخ السدانة في العتبة العباسية المقدسة "المهمة".. إصدار قصصي يوثّق القصص الفائزة في مسابقة فتوى الدفاع المقدسة للقصة القصيرة
"المهمة".. إصدار قصصي يوثّق القصص الفائزة في مسابقة فتوى الدفاع المقدسة للقصة القصيرة (نوافذ).. إصدار أدبي يوثق القصص الفائزة في مسابقة الإمام العسكري (عليه السلام)
(نوافذ).. إصدار أدبي يوثق القصص الفائزة في مسابقة الإمام العسكري (عليه السلام)