تاريخ الفيزياء
علماء الفيزياء


الفيزياء الكلاسيكية
الميكانيك
الديناميكا الحرارية
الكهربائية والمغناطيسية
الكهربائية
المغناطيسية
الكهرومغناطيسية
علم البصريات
تاريخ علم البصريات
الضوء
مواضيع عامة في علم البصريات
الصوت
الفيزياء الحديثة
النظرية النسبية
النظرية النسبية الخاصة
النظرية النسبية العامة
مواضيع عامة في النظرية النسبية
ميكانيكا الكم
الفيزياء الذرية
الفيزياء الجزيئية
الفيزياء النووية
مواضيع عامة في الفيزياء النووية
النشاط الاشعاعي
فيزياء الحالة الصلبة
الموصلات
أشباه الموصلات
العوازل
مواضيع عامة في الفيزياء الصلبة
فيزياء الجوامد
الليزر
أنواع الليزر
بعض تطبيقات الليزر
مواضيع عامة في الليزر
علم الفلك
تاريخ وعلماء علم الفلك
الثقوب السوداء
المجموعة الشمسية
الشمس
كوكب عطارد
كوكب الزهرة
كوكب الأرض
كوكب المريخ
كوكب المشتري
كوكب زحل
كوكب أورانوس
كوكب نبتون
كوكب بلوتو
القمر
كواكب ومواضيع اخرى
مواضيع عامة في علم الفلك
النجوم
البلازما
الألكترونيات
خواص المادة
الطاقة البديلة
الطاقة الشمسية
مواضيع عامة في الطاقة البديلة
المد والجزر
فيزياء الجسيمات
الفيزياء والعلوم الأخرى
الفيزياء الكيميائية
الفيزياء الرياضية
الفيزياء الحيوية
الفيزياء والفلسفة
الفيزياء العامة
مواضيع عامة في الفيزياء
تجارب فيزيائية
مصطلحات وتعاريف فيزيائية
وحدات القياس الفيزيائية
طرائف الفيزياء
مواضيع اخرى

Nonlinear responses
 المؤلف:
Richard Feynman, Robert Leighton and Matthew Sands
المؤلف:
Richard Feynman, Robert Leighton and Matthew Sands
 المصدر:
The Feynman Lectures on Physics
المصدر:
The Feynman Lectures on Physics
 الجزء والصفحة:
Volume I, Chapter 50
الجزء والصفحة:
Volume I, Chapter 50
 2024-06-29
2024-06-29
 1473
1473




+
-
20
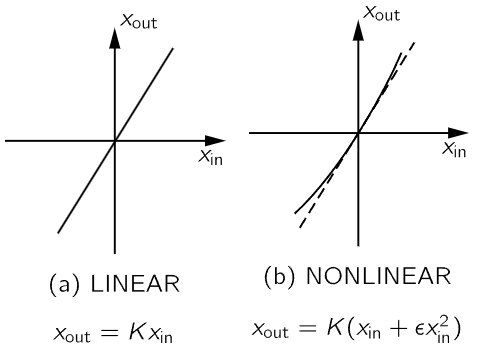
Fig. 50–4. Linear and nonlinear responses.
Finally, in the theory of harmonics there is an important phenomenon which should be remarked upon because of its practical importance—that of nonlinear effects. In all the systems that we have been considering so far, we have supposed that everything was linear, that the responses to forces, say the displacements or the accelerations, were always proportional to the forces. Or that the currents in the circuits were proportional to the voltages, and so on. We now wish to consider cases where there is not a strict proportionality. We think, at the moment, of some device in which the response, which we will call xout at the time t, is determined by the input xin at the time t. For example, xin might be the force and xout might be the displacement. Or xin might be the current and xout the voltage. If the device is linear, we would have

where K is a constant independent of t and of xin. Suppose, however, that the device is nearly, but not exactly, linear, so that we can write

where ϵ is small in comparison with unity. Such linear and nonlinear responses are shown in the graphs of Fig. 50–4.
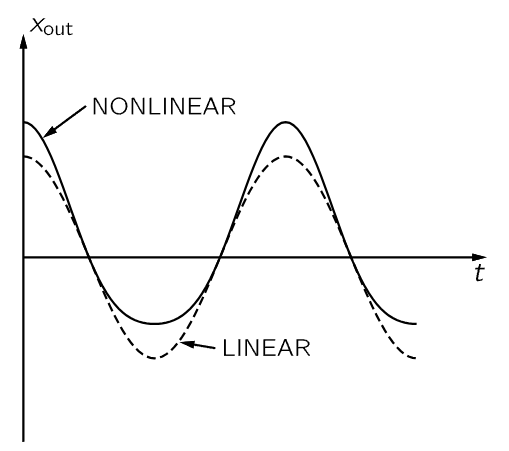
Fig. 50–5. The response of a nonlinear device to the input cos ωt. A linear response is shown for comparison.
Nonlinear responses have several important practical consequences. We shall discuss some of them now. First, we consider what happens if we apply a pure tone at the input. We let xin=cos ωt. If we plot xout as a function of time we get the solid curve shown in Fig. 50–5. The dashed curve gives, for comparison, the response of a linear system. We see that the output is no longer a cosine function. It is more peaked at the top and flatter at the bottom. We say that the output is distorted. We know, however, that such a wave is no longer a pure tone, that it will have harmonics. We can find what the harmonics are. Using xin=cos ωt with Eq. (50.25), we have
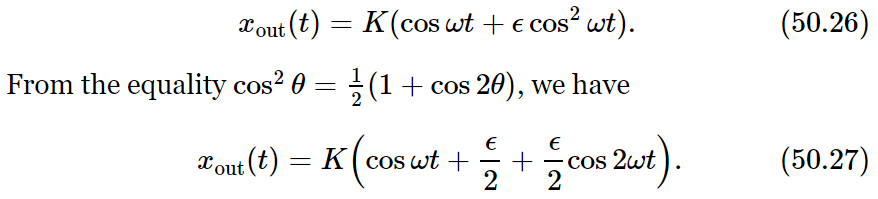
The output has not only a component at the fundamental frequency, that was present at the input, but also has some of its second harmonic. There has also appeared at the output a constant term K(ϵ/2), which corresponds to the shift of the average value, shown in Fig. 50–5. The process of producing a shift of the average value is called rectification.
A nonlinear response will rectify and will produce harmonics of the frequencies at its input. Although the nonlinearity we assumed produced only second harmonics, nonlinearities of higher order—those which have terms like x3in and x4in, for example—will produce harmonics higher than the second.
Another effect which results from a nonlinear response is modulation. If our input function contains two (or more) pure tones, the output will have not only their harmonics, but still other frequency components. Let xin=A cosω1t+B cosω2t, where now ω1 and ω2 are not intended to be in a harmonic relation. In addition to the linear term (which is K times the input) we shall have a component in the output given by
The first two terms in the parentheses of Eq. (50.29) are just those which gave the constant terms and second harmonic terms we found above. The last term is new.
We can look at this new “cross term” AB cosω1t cosω2t in two ways. First, if the two frequencies are widely different (for example, if ω1 is much greater than ω2) we can consider that the cross term represents a cosine oscillation of varying amplitude. That is, we can think of the factors in this way:
We say that the amplitude of cos ω1t is modulated with the frequency ω2.
Alternatively, we can write the cross term in another way:

We would now say that two new components have been produced, one at the sum frequency (ω1+ω2), another at the difference frequency (ω1−ω2).
We have two different, but equivalent, ways of looking at the same result. In the special case that ω1≫ω2, we can relate these two different views by remarking that since (ω1+ω2) and (ω1−ω2) are near to each other we would expect to observe beats between them. But these beats have just the effect of modulating the amplitude of the average frequency ω1 by one-half the difference frequency 2ω2. We see, then, why the two descriptions are equivalent.
In summary, we have found that a nonlinear response produces several effects: rectification, generation of harmonics, and modulation, or the generation of components with sum and difference frequencies.
We should notice that all these effects (Eq. 50.29) are proportional not only to the nonlinearity coefficient ϵ, but also to the product of two amplitudes—either A2, B2, or AB. We expect these effects to be much more important for strong signals than for weak ones.
The effects we have been describing have many practical applications. First, with regard to sound, it is believed that the ear is nonlinear. This is believed to account for the fact that with loud sounds we have the sensation that we hear harmonics and also sum and difference frequencies even if the sound waves contain only pure tones.
The components which are used in sound-reproducing equipment—amplifiers, loudspeakers, etc.—always have some nonlinearity. They produce distortions in the sound—they generate harmonics, etc.—which were not present in the original sound. These new components are heard by the ear and are apparently objectionable. It is for this reason that “Hi-Fi” equipment is designed to be as linear as possible. (Why the nonlinearities of the ear are not “objectionable” in the same way, or how we even know that the nonlinearity is in the loudspeaker rather than in the ear is not clear!)
Nonlinearities are quite necessary, and are, in fact, intentionally made large in certain parts of radio transmitting and receiving equipment. In an am transmitter the “voice” signal (with frequencies of some kilocycles per second) is combined with the “carrier” signal (with a frequency of some megacycles per second) in a nonlinear circuit called a modulator, to produce the modulated oscillation that is transmitted. In the receiver, the components of the received signal are fed to a nonlinear circuit which combines the sum and difference frequencies of the modulated carrier to generate again the voice signal.
When we discussed the transmission of light, we assumed that the induced oscillations of charges were proportional to the electric field of the light—that the response was linear. That is indeed a very good approximation. It is only within the last few years that light sources have been devised (lasers) which produce an intensity of light strong enough so that nonlinear effects can be observed. It is now possible to generate harmonics of light frequencies. When a strong red light passes through a piece of glass, a little bit of blue light—second harmonic—comes out!
 الاكثر قراءة في الصوت
الاكثر قراءة في الصوت
 اخر الاخبار
اخر الاخبار
اخبار العتبة العباسية المقدسة

الآخبار الصحية


 قسم الشؤون الفكرية يصدر كتاباً يوثق تاريخ السدانة في العتبة العباسية المقدسة
قسم الشؤون الفكرية يصدر كتاباً يوثق تاريخ السدانة في العتبة العباسية المقدسة "المهمة".. إصدار قصصي يوثّق القصص الفائزة في مسابقة فتوى الدفاع المقدسة للقصة القصيرة
"المهمة".. إصدار قصصي يوثّق القصص الفائزة في مسابقة فتوى الدفاع المقدسة للقصة القصيرة (نوافذ).. إصدار أدبي يوثق القصص الفائزة في مسابقة الإمام العسكري (عليه السلام)
(نوافذ).. إصدار أدبي يوثق القصص الفائزة في مسابقة الإمام العسكري (عليه السلام)